仅5厘米高、1克重!昆虫级机器人“大显身手”,挑战各种地形运动,还可翻筋斗,跳上悬停无人机
最大限度地提高效率
跳跃在昆虫世界中极为常见,跳蚤跳到新宿主身上、蚱蜢在草地上蹦跶,都是典型例子。但在昆虫大小的机器人领域,跳跃并不常见,它们大多选择飞行或爬行。实际上,跳跃在能源效率方面具有显著优势。
机器人跳跃时,会将离地高度产生的势能转化为下落时的动能。动能在撞击地面时又转化回势能,上升时再次转化为动能,如此循环。
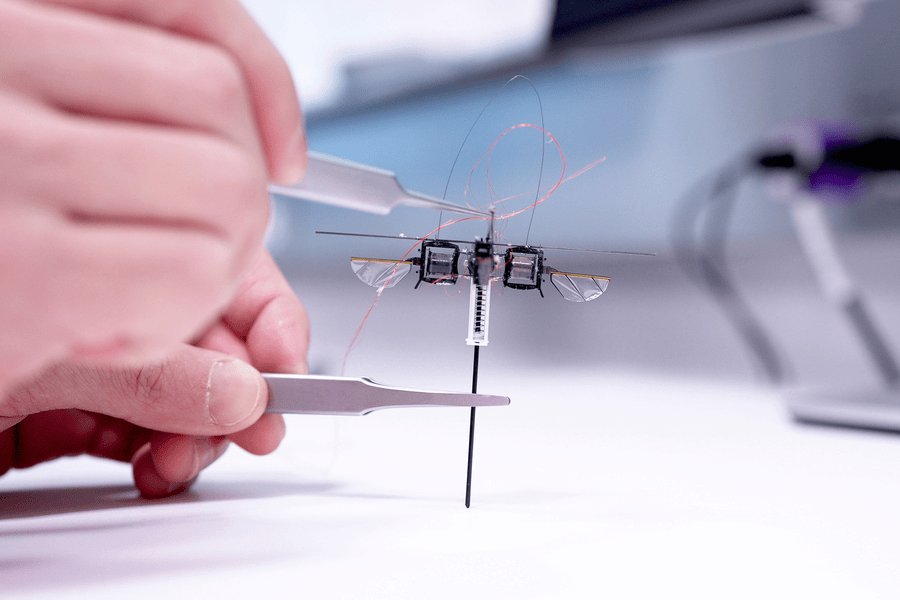
为提升这一过程的效率,麻省理工学院的这款机器人安装了一条由压缩弹簧制成的弹性腿,其结构类似按动笔上的弹簧。机器人落地时,弹簧能将向下的速度转变为向上的速度。
Hsiao 解释道:“要是弹簧是理想状态,机器人就能毫无能量损耗地持续跳跃。但实际的弹簧并非完美,所以我们借助拍打模块,补偿其与地面接触时损失的少量能量。”
机器人弹回空中时,扑翼会提供升力,同时确保其保持直立姿态,并为下一次跳跃调整方向。它的四个扑翼机构由柔软的致动器(即人造肌肉)驱动,这些致动器十分耐用,即便反复与地面撞击也不易损坏。“在一系列实验过程中,我们始终使用同一个机器人,从未中途停下来维修过。”
机器人性能的关键在于快速控制机制,它决定了机器人下一次跳跃的定位。通过外部运动跟踪系统进行传感,观察者算法利用传感器测量数据,计算出所需的控制信息。
机器人跳跃时,会沿弹道轨迹在空中划出弧线。在轨迹顶点,它会估算着陆位置。然后,依据目标着陆点,控制器计算出下一次跳跃所需的起飞速度。飞行过程中,机器人通过拍打翅膀调整方向,使其以合适的角度和轴着地,从而实现正确的方向和速度移动。

耐用性和灵活性
研究人员在草地、冰面、湿玻璃甚至不平坦的地面等不同表面上测试了该机器人。机器人没有出现任何问题。即使在移动的表面上,它也能稳定地跳跃,最高可达 20 厘米。
Hsiao 说:“机器人不太受着陆表面角度的影响。只要撞击地面时不打滑,就能正常运作。”
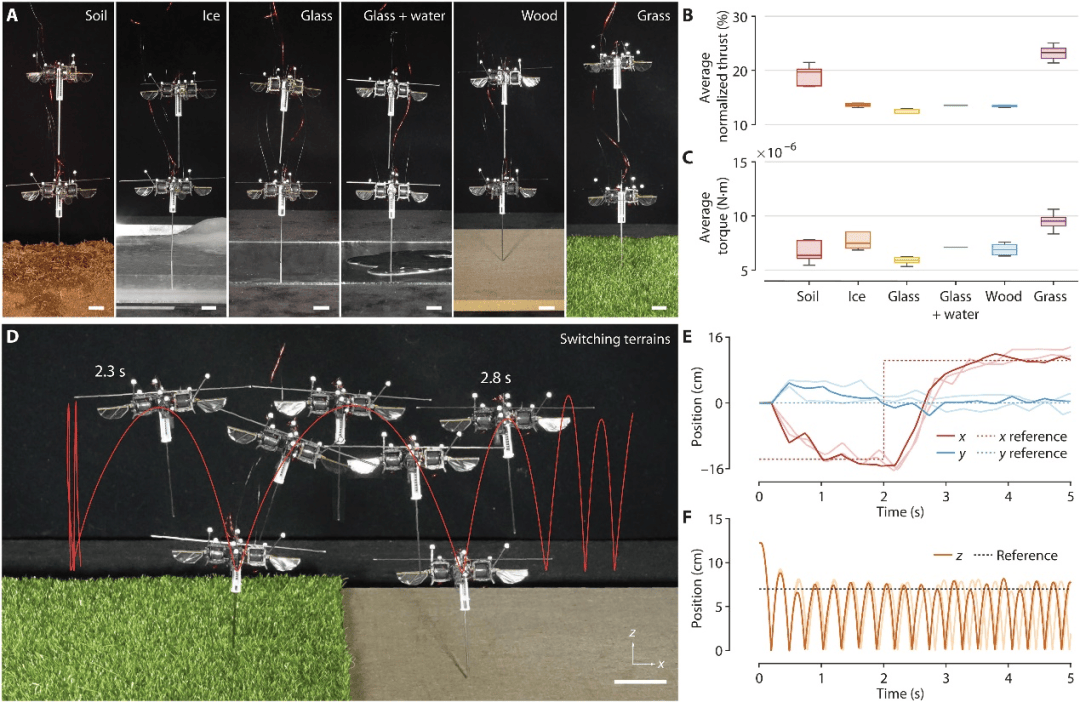 图 |不同地形上的跳跃演示
图 |不同地形上的跳跃演示
然而,在草地上跳跃比在玻璃表面上跳跃需要更多的能量,因为为了抵消草地的阻尼效应,翅膀拍打需要消耗更多的能量。
得益于小巧的体积和轻盈的重量,这款机器人的转动惯量更小,相比大型机器人,它更加灵活,抗碰撞能力也更强。
这款机器人还能完成一些特技动作,例如翻筋斗或跳上飞行中的无人机。此外,研究团队展示的跳跃机器人可承载两倍重量,而其最大有效载荷可能远不止于此。增加重量并不会降低机器人的效率,实际上,弹簧的效率才是限制其承载能力的关键因素。
展望未来,研究人员计划利用机器人的重物承载能力,为其安装电池、传感器和其他电路,期望它能实现自主运作,走出实验室,应用于现实场景。
未参与此项研究的伊利诺伊大学厄巴纳-香槟分校助理教授 Justin Yim 评价称:“多模态机器人(融合多种运动策略的机器人)通常很难研制,在如此微小的尺寸下实现更是难能可贵。这款小型多模态机器人功能多样,能在崎岖或移动的地形上翻转、跳跃,甚至跳到其他机器人上,令人惊叹。该研究展示的连续跳跃能力,可助力机器人在障碍物繁多的环境中实现敏捷、高效的移动。”
原文链接:
https://news.mit.edu/2025/hopping-gives-tiny-robot-leg-up-0409